 概要
概要
自動車の安全性に関するトレンドは、死角検出や衝突防止支援のためのレーダー・システムを、より高い精度と信頼性のあるターゲット識別のレベルへと押し上げつつあります。 その結果、エンジニアは、取り付けブラケット、フェイシア、塗装色、バンパーアセンブリが、24GHzおよび77GHzの自動車用レーダーシステムの遠距離放射パターンにどのような影響を与えるかをよりよく理解する必要があります。 車車間通信などの低周波(および長波長)アンテナオンビークルのシミュレーションに長い間使用されてきた電磁(EM)シミュレーションは、現在では、理想的な24 GHzおよび77 GHzセンサーそのものだけでなく、アンテナパッケージやデバイスを取り囲む車体の特徴も含めて、忠実度の高い解析を行うことができます。
この論文では,24 GHz のセンサを使用して,スタンドアロンセンサと車両に搭載されたセンサのシミュレーションの違いについて説明します. 有限差分時間領域(FDTD)による効率的な電磁界解析と,CUDA 対応のグラフィックプロセッシングユニット(GPU)による計算の飛躍的な高速化により,Remcom 社の XFdtd® は,このレベルの複雑さを持つアンテナ・イン・システム設計のシミュレーションに最適な,完全 任意 3D EM シミュレーションソフトウェアツールとなっています.
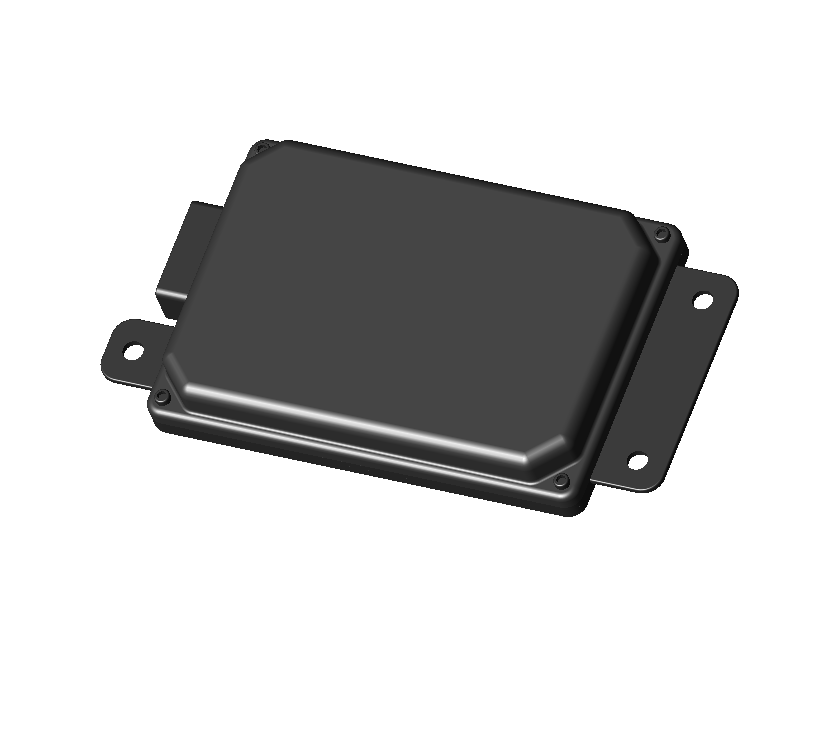

セダンのリアバンパーに取り付けられた24GHzセンサーのXFdtdシミュレーションは、本稿での議論の枠組みを提供する。
高周波数における設計上の課題
24GHzと77GHzという短い波長は、5.9GHzの車車間通信のような低い周波数のアプリケーションにはない設計上の課題をもたらす。 センサーレベルでは、PCB層の構造が電気的に大きくなり、予期せぬ干渉を引き起こす可能性がある。 同様に、センサーが車両に搭載されると、外装の厚みが放射波を歪ませ、望ましくない反射を引き起こす可能性があります。 これらの問題の中には、センサーの設計変更につながるものもあれば、自動車メーカーにガイドラインを提供することで対処できるものもある。 いずれにせよ、エンジニアは、センサーの性能に影響を与えるあらゆる側面を考慮しながら、忠実度の高い解析を実行し、設計上の問題を洗い出すことができるツールを必要としています。
レーダーは本質的に時間領域
レーダーは本質的に時間領域のプロセスです。信号は送信機から出力され、物体に反射して受信機に戻ります。 レーダー設計の多くは、数学的信号処理の概念を用いたシステム・レベルで行われますが、シグナル・インテグリティの問題は、レーダー回路基板上で発生し、レーダー・システム全体の性能に悪影響を及ぼす可能性があります。 これらの不要な電流や電圧の問題領域の周波数コンテンツを見るだけでは、レーダーシステムを徹底的に設計したりトラブルシューティングしたりするのに十分な情報が得られない場合があります。
FDTD 電磁界シミュレーションには、信号の動きを時間の関数として示す機能があります。 回路の問題領域に流入する特定の電流や電圧の発生源を追跡することで、レーダー・デバイスの性能問題の根本的な原因を明らかにすることができます。 問題は、基板上の信号トレース間の不要なカップリングに起因する可能性があります。 問題は、アンテナや回路の他の高Q部分からエネルギーがリンギングダウンすることに起因するかもしれません。 このような時間依存の現象は、純粋な周波数領域のアプローチでは明確に見ることができません。このようなタイプの問題を見つけるには、時間領域のシミュレーションが必要です。
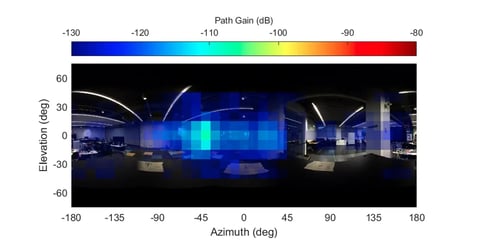
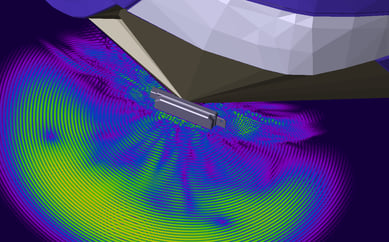
時間領域フィールドはセンサー内の相互作用を示す。
さらに、センサーが車両に取り付けられると、受信アンテナの干渉によりターゲットの識別が困難になることがある。 この干渉は、バンパーアセンブリの共振設定や、取り付けブラケットからの反射によって引き起こされる可能性があります。FDTD 電磁界シミュレーションと GPU コンピュー タ技術により,自動車のバンパーや後端部など の大型構造物を車載レーダーデバイスのシミュレー ションに含めることができるようになりました. 自動車バンパーの内側に取り付けた 24 GHz または 77 GHz レーダーの高忠実度の電磁界シミュレーションは、アプリケーションエンジニアとその顧客が、設計サイクル中にアンテナの性能とそれが車両の構造や材料によってどのように変化するかを徹底的にトラブルシューティングするのに役立ちます。
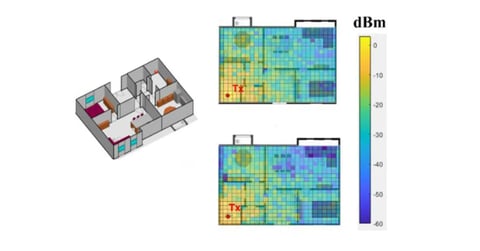
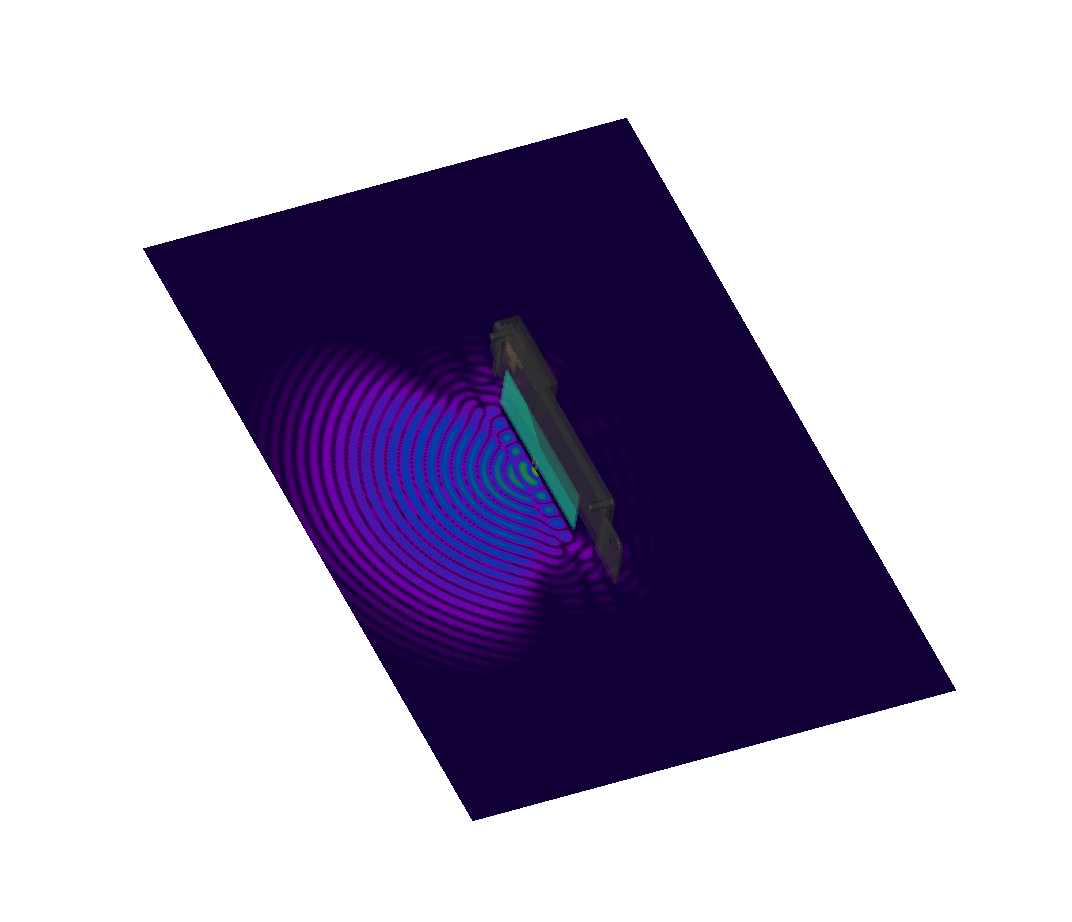
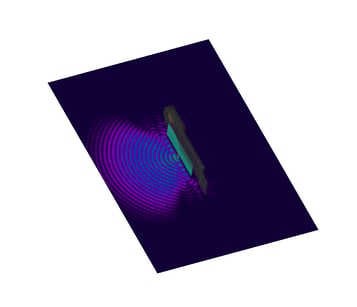
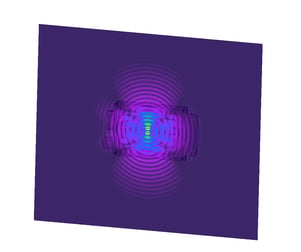
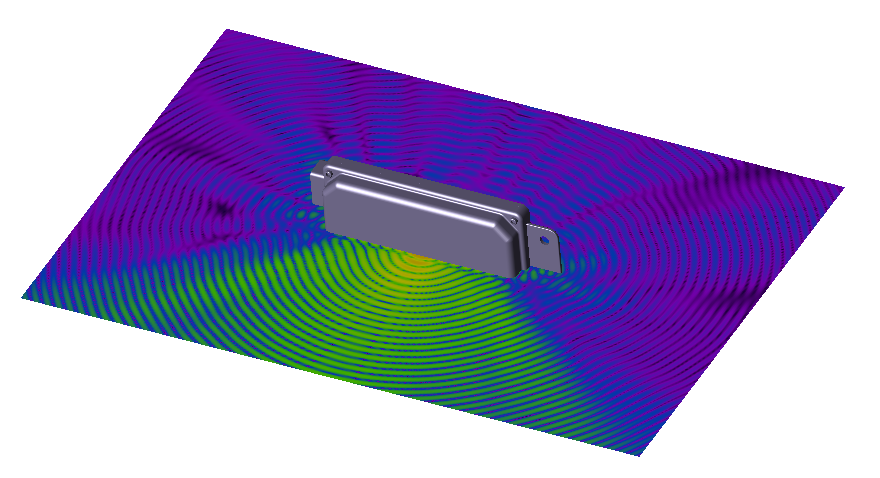
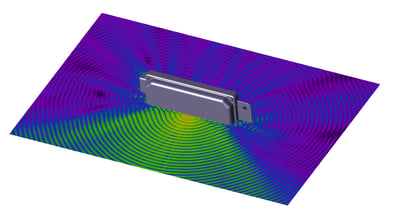
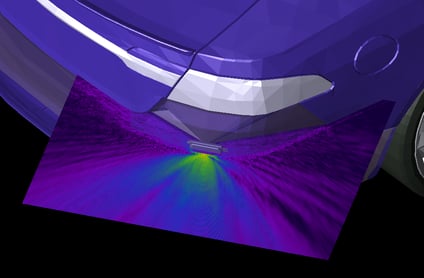
発射から1.8ナノ秒後の電界分布。
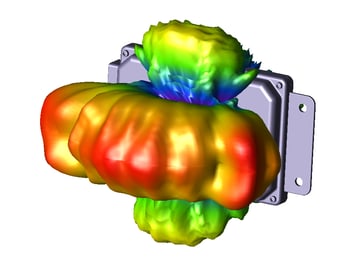
上の図は、センサーから放射される電界を比較したものである。 右側のスタンドアローンのケースとは異なり、左側のケースは筋膜が波を捕捉していることを示している。 これは送信電界を歪ませ、トラップされた電界がレシーバーに反射して干渉を引き起こすため望ましくない。
パラメタリゼーションはアンテナの先を探る
車載レーダーの設計では、理想的な周波数領域のアンテナ特性だけでなく、それ以上のものを解析し、シミュレーションする必要があります。 アンテナに近いパッケージの詳細や、アンテナから1メートルほど離れた車体の特徴も、アンテナのファーフィールドパターンとレーダーシステムの性能に影響を与えます。 アンテナの構造上、組み立て時の複数のレイヤーの位置合わせ(レジストレーション)はアンテナの性能に影響を与えます。 回路基板の誘電体、回路基板をパッケージに固定する取り付けネジ、アンテナを覆うパッケージカバーやレドームなどのエッジ効果は、アンテナの放射パターンを変化させたり、システムレベルの設計では現れないアンテナへの時間領域反射を引き起こしたりする可能性があります。 車載レーダー・デバイスのパッケージングにとどまらず、車両のバンパーやその周辺部全体もアンテナやレーダー・システムの性能に影響を与えます。 車両やバンパーの材質、形状、寸法、デバイスパッケージングを考慮すると、レーダーシステム設計において検討すべき多くの変数が生じます。
バンパーの素材、塗装のコーティング、厚みなど、多次元的なばらつきをテストする方法のひとつに、EMシミュレーションのパラメータスイープがあります。 シミュレーションで指定されるほとんどの量は、変数を使用して行うことができるため、自動化された方法で値の範囲にわたってスイープすることができます。 パラメトリックスイープは、自動車用レーダー装置の取り付け位置をバンパーに沿って水平に変化させたり、カーブしたコーナーの周囲で変化させたりすることができます。 一度に複数のパラメータを変化させるネステッドスイープは、設計サイクルの初期段階で設計空間を探索し、システム性能に関する貴重な理解と直感を得るのに役立ちます。 感度解析と最適化も、複数のシミュレーションを繰り返してパラメータ値を変更します。通常、これらは設計サイクルの後半で検証に使用されます。
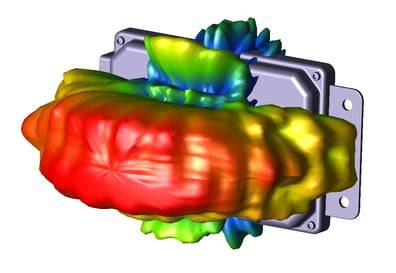
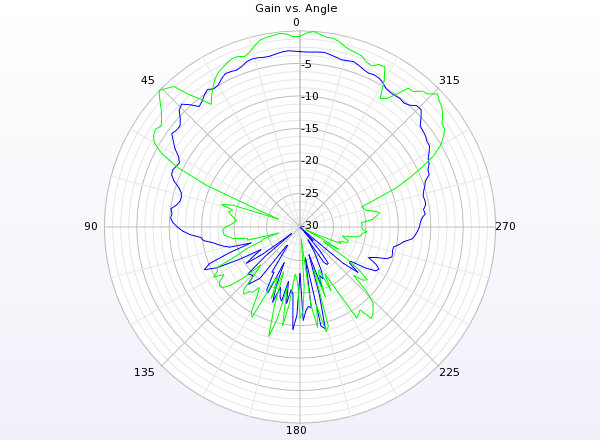
パラメトリック解析は、設計性能を向上させるために使用されます。
波長に対する車両シミュレーションサイズ
個々のアンテナ構造とその遠方界放射パターンのシミュレーションは、長年にわたってEMシミュレーションソフトウェアの定番となっています。 これには、独立したアンテナだけでなく、集積回路(IC)内のアンプに密接に接続されたオンチップアンテナも含まれます。 さらに最近では、64 ビットコンピューティングの登場と、それによって個々のシミュレーションに使用できる RAM が増加したため、EM シミュレーションはアンテナと車両を一緒に含めるまでに拡張されました。ただし、車両は、自動車、衛星、船舶、または航空機の表面金属を見るだけの別の電磁場定式化で表される場合があります。
1つの完全任意3次元電磁界シミュレーションを使用して、アンテナ構造と車両を一緒に高精度にシミュレーションするための課題は、シミュレーション問題のサイズであり、多くの場合、メッシュの要素数や問題が消費するRAM(メモリ)量で表されます。 何GBものRAMを必要とするシミュレーションは、実行に時間がかかりすぎるか、利用可能なコンピュータのハードウェア能力を完全に超えてしまうため、実用的ではなくなります。
GPUは、4GBと20GBの問題のシミュレーション時間を短縮します。
EM simulation of an antenna generally scales with signal frequency because the EM simulation accuracy is based largely on the number of mesh cells per wavelength. 半波長ダイポールアンテナのシミュレーションは、メッシュセルサイズが波長に基づいてアンテナ寸法にスケールするため、低周波でも高周波でもほぼ同じシミュレーション時間を要します。 、 任意3次元電磁界シミュレーションでは、 任意3次元電磁界シミュレーションで 任意3次元電磁界シミュレーションでは 任意3次元電磁界シミュレーションの 、 信号の 信号周波数が 信号周波数が 信号周波数が 信号周波数が 信号周波数が 信号周波数が 、、ーこのーこのー このーーーーーーーーーーーーーーーーーーーーーーーーー ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
バンパアセンブリーのような大きな物理的特徴の周辺では1.25 mmの大きなメッシュセル、センサーのアンテナの給電構造のような微細な形状の周辺では0.04 mmの小さなメッシュセルと、1つのシミュレーション内でメッシュサイズを変えることができますが、1つのシミュレーションで実用的または正確なメッシュサイズの範囲には常に限界があります。 高周波レーダーデバイスとアンテナを、自動車のバンパー領域と一緒に、1つの完全任意3D電磁界シミュレーションでシミュレートできるようになったことは、電磁界シミュレーションのFDTD法の利点です。 FDTD provides both the ability to scale mesh size linearly with problem size and to leverage tremendous efficiencies with CUDA-enabled GPU systems.
FDTDシミュレーションは問題サイズに比例してリニアにスケールする
、 任意3次元電磁界シミュレーションには、ー周波数領域とー時間領域。 どちらもSパラメータを含む定常状態の周波数領域データをシミュレーションすることができますが、シミュレーション問題のサイズが大きくなるにつれて、シミュレーション時間がどの程度速くなるかに違いがあります。 、ー周波数領域EMシミュレーションではn乗(nはnはnはnは問題のnは問題のnはー問題サイズ(FDTD)シミュレーションのー周波数領域FDTDシミュレーションのー周波数領域FDTDシミュレーションー時間。 時間領域シミュレーションの時間領域シミュレーションの時間領域シミュレーションの時間領域シミュレーションの時間領域シミュレーション時間 問題サイズが大きいほど、時間領域シミュレーションと周波数領域シミュレーションの相対的なメリットは大きくなります。
タイムドメイン・シミュレーターは、デザイン内の各ポートに対して全体のシミュレーションを実行します。 一般的に周波数領域シミュレータでは、このようなシミュレーションを行う必要はありません。 ポート数の多いシミュレーションでは、有限要素法(FEM)のような周波数領域のEM定式化が良い選択かもしれません。 設計に多くの信号ポートを使用しないアンテナアプリケーションの場合、時間領域シミュレーションは大きな問題サイズに対して有利です。
FDTDはGPUでうまく並列化できる
大規模なEM構造を迅速にシミュレーションするための一般的なアプローチとして、CUDA対応GPUが利用されている。 CUDA(Compute Unified Device Architecture)は、NVIDIA社が開発した並列コンピューティングプラットフォームであり、同社が製造するグラフィックプロセッシングユニット(GPU)によって実装されます。 もともとはビデオグラフィックを高速化するために開発されたGPUは、多くのハイパフォーマンス・コンピューティング(HPC)アプリケーションに普及しています。
GPUと従来のCPUコンピューティングの比較は劇的だ。 GPUは、CPUが数個のプロセッサしか提供できないのに対して、数百のプロセッサを適用することができます。 周波数領域の電磁場シミュレーション以上に、時間領域の電磁場シミュレーションは並列化がうまくいきます。FDTDは、GPUが提供するシミュレーション時間の高速化をフルに活用できます。
概要
車載用レーダーセンサを設計することは、複雑な取り付けブラケットやバンパーアセンブリを導入する前であっても、困難な作業です。 計算FDTD電磁界シミュレーションは、エンジニアが最終的な取り付け構成を検討しながら、センサーの忠実度の高い解析を行うために必要なツールを提供します。 これは、XFdtdのXStream®GPU Accelerationテクノロジーによって実現されます。このテクノロジーは、GPUを活用することでEMシミュレーション時間を大幅に短縮し、XFによる超高速FDTD数値計算を可能にします。 最終的に、エンジニアはレーダーシステムの信頼性と精度を高めることで、自動車安全業界を前進させることができます。
参考文献
[1] 電磁場シミュレーションによるマイクロ波回路モデリング Daniel G. Swanson, Jr. and Wolfgang J. R. Hoefer著 Artech House c 2003 ISBN: 1-58053-308-6