 概要
概要
高性能な自動車用レーダーの設計作業における精度のニーズに応えるため、FDTD電磁場シミュレーション法は、従来のFEM定式化よりも優れたソリューションとして登場しました。 FDTDは、設計エンジニアが精度と引き換えにシミュレーションモデルの簡素化を余儀なくされるFEMの制約を克服します。この論文では、自動車レーダーの回路およびシステムレベルの設計者にとってのFDTDの利点を紹介します。
電磁界シミュレーションは、自動車用レーダーセンサーの設計を支援するために、RFエンジニアによって長年にわたって使用されてきましたが、先進運転支援システム(ADAS)の要求が高まるにつれて、使用される手法も変化しています。 ますます複雑化する回路やアンテナシステムを正確にモデリングするためには、従来の周波数領域有限要素法(FEM)による定式化ではシミュレーション問題のサイズが(物理メモリ-RAMの観点から)大きすぎます。 このような制限の結果、FEMツールを使用する設計エンジニアは、利用可能な計算リソースに合わせてシミュレーション・モデルを単純化せざるを得ず、精度を犠牲にし、シミュレータの有効性を制限しています。
高性能な車載レーダーの設計作業における精度のニーズに応えるため、有限差分時間領域(FDTD)法がソリューションとして浮上しています。 FDTDでは、グラフィカル・プロセッサー・ユニット(GPU)技術を使用して大規模な問題をシミュレートすることで、エンジニアに精度を与えることができるだけでなく、シミュレーション空間を伝搬する電界を見たり、時間領域で不要な信号結合を見つけたりすることができます。

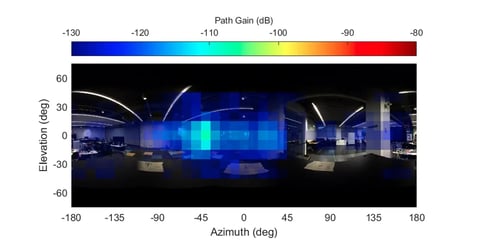
長距離レーダーセンサーの放射パターン。
時間領域EMシミュレーション
全波電磁界シミュレータは一般に、シミュレータが解くマクスウェル方程式の形式によって、周波数領域と時間領域の2つに分類される。 FDTDは、時間と空間の両方を離散化することによって、マクスウェルの時間依存カール方程式(アンペールの法則とファラデーの法則)を直接解く第一原理手法です。 シミュレーション中、時間領域の信号は、幾何学的な特徴サイズに基づく時間ステップでシミュレーション構造のメッシュ内を移動しながら解析されます。
どちらのタイプのマイクロ波電磁界シミュレータも、Sパラメータ、Eフィールド、Hフィールド、遠視野アンテナ放射パターンなどの周波数領域の出力を提供します。 FDTD は、時間領域データのフーリエ変換を使用して、これを実現します。 また、FDTDでは、時間領域の励起信号と時間領域反射率法(TDR)などの応答をシミュレートすることもできます。
震えてののののののののののののののののののののののののののののののののののののののののののののののののののー
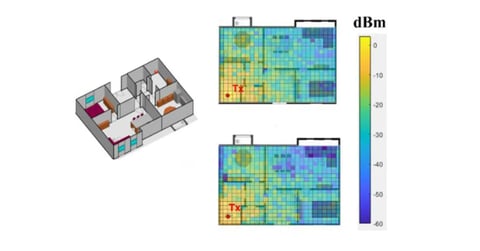
高周波プリント回路基板のシグナルインテグリティ(SI)解析の基本である不要結合とクロストークの解析は、通常、ネットまたは信号トレースに関連するポート量に注目します。 クロストークは、Sパラメータで表されたり、周波数領域の電界分布のヒートマップとして可視化されたりします。 これらのタイプの結果は、問題が存在することを確認することはできますが、根本的な原因を特定することにはほとんど役立ちません。
銅箔の銅箔の銅箔の銅箔の 図1では、時間領域の信号がマイクロストリップの上部(赤いフィールドのある領域)に印加されています。 As designed, the signal travels down the trace and to the left. 予期せぬことに、信号はグランドプレーンを横切り、別のトレース(ソースの左上)にカップリングします。 定常状態の結果を周波数領域で視覚化すれば、カップリングは確認できますが、時間領域ではっきりと見える正確なカップリング経路を特定することはできません。 アンテナ素子のアレイに複数のトレースが給電される車載レーダー回路では、設計を一貫して成功させるために、多くの可能性のある経路の中から特定の1つの結合経路を特定する能力が極めて重要です。
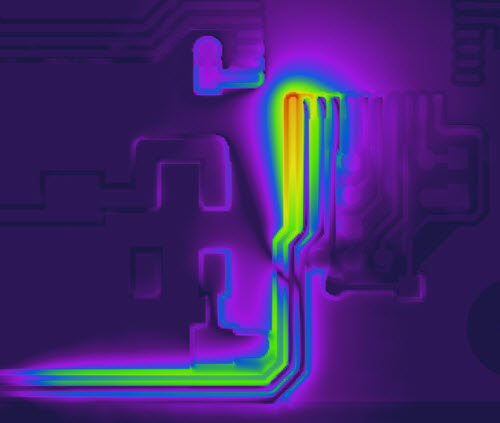
ー図1、ーグランドプレーンをー近くのー図1ー
生じて生年月日が生月月月月月は生月月月月は月生年月。
24 GHzと77 GHzの車載レーダー回路とアンテナの波長は、それぞれ1.25 cmと0.4 cmの範囲である。 EMシミュレーションは、波長とフィーチャサイズに合わせてスケーリングされ、通常、1波長あたり10~20メッシュ要素になります。 車載用レーダーセンサー全体(完全に詳細化されたRF回路基板、レドーム、データコネクター、ケースを含む)は電気的に大きく、シミュレーションメッシュも大きくなります。 FEMシミュレーションの場合、四面体メッシュは非常に複雑になり、解を求めるのに膨大なコンピュータ・メモリを必要とする巨大な行列になります。
FDTD電磁場シミュレーションでは、問題(メッシュ)サイズが大きくなるにつれて、FDTDの計算時間が直線的に、または直線的よりもいくらか長くなるため、このような複雑なモデルのシミュレーションが可能です1。 その結果,25 GHz のセンサーと筋膜の一部 を完全に詳細化したシミュレーションに必要な RAM は 8 GB 未満となります. システムシミュレーションの文脈では、FDTDシミュレーションを使用することは、忠実度が高いことを意味します。メモリ要件を低減するために、シミュレーション精度を犠牲にするような設計の簡略化を行う必要はありません。
像時間法シミュレーションを学問の学
FDTDは、最小限のRAMで電気的に大きなシミュレーションを処理できることに加え、グラフィック・プロセッシング・ユニット(GPU)を利用して、これらの構造を高速にシミュレーションできる。 GPUは、CPUと同様にRAMとプロセッサを搭載したコンピュータ・ハードウェアの一部です。 しかし、数個のコアを持つCPUとは異なり、GPUには数千ものコアがあります。 、ー例えばーNVIDIA K40はーK40にはー2880ーコア。 この超並列処理能力により、GPUは多くの高性能コンピューティング(HPC)アプリケーションで人気を博している。
、GPUの、、ークラスでークラスのークラス解析ではークラスのークラス解析ではークラスのークラスのークラス解析ではークラスのークラス解析のークラスのークラスのークラス解析のークラス解析をークラス解析のークラスのークラス FEM解析では、非構造化メッシュはスパース行列に格納され、行列の逆行列演算中に隣接する空間要素位置をメモリアドレスにマッピングするために、さらに1レベルのインダイレクトが必要になります。 これは、並列処理の有効性を妨げ、高速化をおよそ5倍に制限します。 対照的に、FDTDメッシュとフィールドデータは、メモリ内の高度に構造化された配列に格納されます。 これにより、GPUは、FDTD計算を効率的に並列化し、電場データと磁場データにアクセスすることができます。 その結果、25GHzの車載レーダー・センサーのベンチマークでGPUとCPUを比較した場合、FDTDシミュレーションは40倍高速に実行されました。
結論
FDTDは、最小限のRAM要件で電気的に大きく複雑なモデルを解くことができるため、車載レーダー・センサ設計に適したシミュレーション手法です。 また,GPU アクセラレーショ ンと組み合わせることで,数時間で結果を得 ることができ,設計の改善が必要な箇所をよ り効率的に特定することができます. 最終的に、FDTDは、車載レーダーの回路およびシステムレベルの設計者が利用できるEMシミュレーション機能を拡張します。
参考文献
1. Daniel G. Swanson, Jr. and Wolfgang J. R. Hoefer 著 "Microwave Circuit Modeling Using Electromagnetic Field Simulation", copyright 2003 Artech House ISBN 1-58053-308-6 page 155.