ーレーダーシミュレーションソフトウェアWaveFarer®がーレーシングによりーレーシングをー車両、ー道路構造物ー歩行者ーその他のーその他のーその他のー様々なーレーダーシミュレーションソフトウェアWaveFarer®がー
ドライブシナリオシミュレーションは、センサ設計の早期テストや実走行テストを補完する上で大きなメリットをもたらす。しかし、ミリ波レーダーセンサーに焦点を当てると、現実的な自動車シナリオのシミュレーションにはいくつかの課題があります:
-
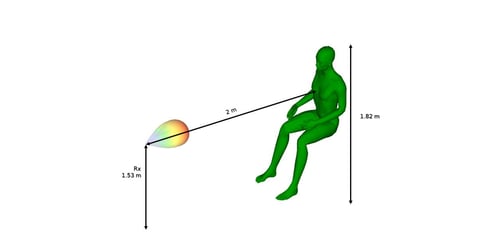
従来のRCS概念を無効にするニアフィールド条件
-
従来の "伝搬 "光線追跡装置では複雑な、高密度の車両モデル
-
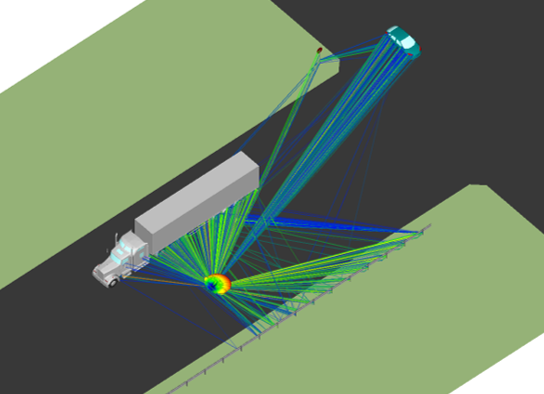
道路脇の構造物(ガードレール、標識、駐車車両など)からの複雑なマルチパス
-
複数の車両が動くダイナミックなシナリオ。
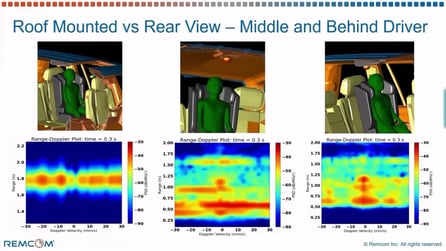
This presentation uses WaveFarer to describe these challenges, possible solutions, and recent R&D to address key aspects of the problem, including target scattering, multipath and clutter, and micro-Doppler from motion such as the moving limbs of a walking pedestrian.
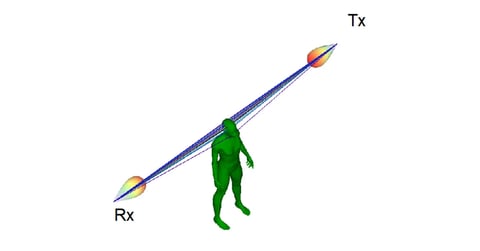
PO ScatterとUTDの相互作用のみ
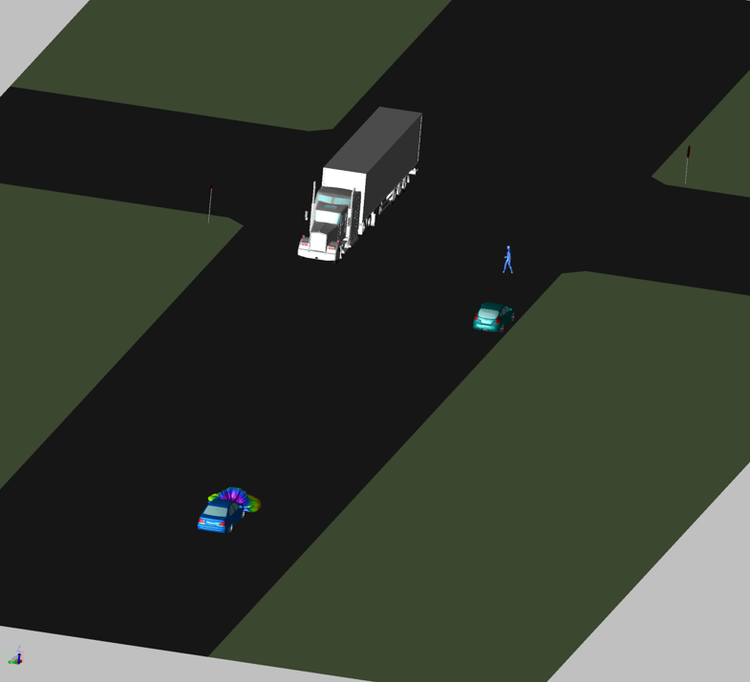
レーダーホスト車の接近に伴って横断する歩行者。
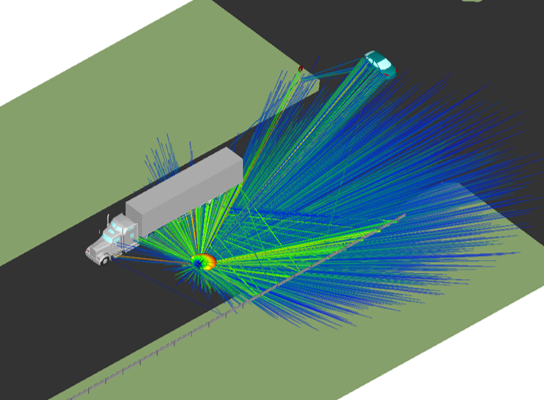
拡散散乱あり
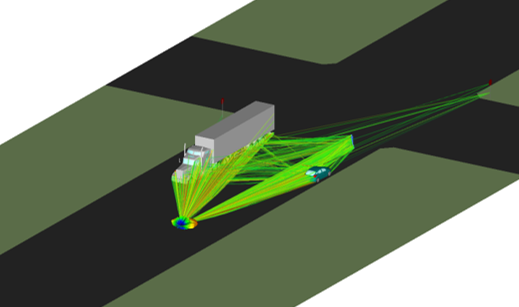
支配的なパスは、車両、歩行者、停止標識との相互作用を示す。