車車間通信(IVC)システムは、潜在的に多くの有益なサービスを約束する。アダプティブ・クルーズ・コントロールが、さまざまな速度や近くの車の位置をモニターして、自動的に速度を調整し、衝突を回避するのを想像してみてほしい。交通渋滞は、リアルタイムの状況を送信し、混雑していない道路にドライバーを迂回させることで軽減できる。このような対策は、全体的な移動時間を短縮することで公害の削減につながる可能性さえある。
残念なことに、安定した通信リンクは多くの設計上の課題に直面している。IVCシステムには、無指向性の信号を送受信する能力が必要です。単一のアンテナでも完璧に配置できればこの目標は達成できるが、車両には実用的な取り付け位置がほとんどない。このため、一般に最適な配置の可能性は排除され、複数のアンテナを使用することになります。このMIMO配置では、設計エンジニアは完全なカバレッジを確保しなければなりません。また、車両の形状や材質の影響は、アンテナのインピーダンスや放射特性に影響するため、さらに複雑な作業となります。
IVCシステムの設計には、外部変数も一役買っている。これらの製品は、さまざまな環境や動作条件下で機能しなければならない。近くにトラクター・トレーラーがあると、信号が反射したりブロックされたりする。濡れた路面は乾いた路面とは異なるフィールドを伝搬し、都市部の峡谷での伝搬は多くの通信システムを悩ませる。
設計段階でこのような障害を発見し対処することで、コストのかかる手戻りの可能性を大幅に減らし、製品上市の成功確率を大幅に向上させることができる。しかし、測定だけでは不十分であることが判明する場合もある。しかし、測定だけでは不十分な場合があります。アンテナをさまざまな取り付け位置に移動し、新たに測定を行うには時間がかかり、システムを実際の使用環境でテストできるとは限りません。また、測定は設計と製作が完了した後にしか行えない場合もあります。製作にかかるコストと時間は、長く高価な設計サイクルにつながります。
XFdtdは、このような問題を正確かつ効率的にモデル化します。XFdtdは、このような問題を正確に、効率的にモデル化する手段を提供します。XFdtdは、周囲の環境条件だけでなく、存在する車両の数や種類を完全に制御することができます。XFでのアンテナやアレイの設計は、同じアプリケーションを使用した実地試験へとシームレスに移行し、製作前に実際の動作シナリオを評価することで、よりロバストな設計プロセスが生まれます。
この例では、乾燥路面の高速道路交通状況で機能するIVCシステムを考えます。図 1 に示すように、2 台の乗用車が高速道路の右側車線を走行し、その左側に大型トラクタートレーラートラックがある。5.9GHzにチューニングされた垂直モノポールがIVC送信機として機能し、後部車両に搭載されている。初期シミュレーションでは、3台の車両と路面との間の電界相互作用を捕捉し、将来のより複雑な実験の実行可能性を判断する。
この例では、車の下の道路を構築することから始めます。図1の12メートルの高速道路は、XFの使いやすく強力なCADモデリングツールを使って作られました。簡単なオンライン検索で、幅広い車種をカバーするCADファイルが見つかりました。XFはさまざまなCADフォーマットに対応しているため、インポートするための互換性のあるファイルを簡単に見つけることができます。さらに、内蔵のマテリアルライブラリには、この作業に必要なマテリアルのほとんどがすでに含まれています。図2は、インストールされているマテリアルライブラリからプロジェクトに追加されているいくつかのマテリアルを示しています。既存のCADと材料ライブラリを活用することで、エンジニアはモデルの生成や材料特性の検索に費やす時間が減り、プロジェクトのセットアップ時間が短縮されます。
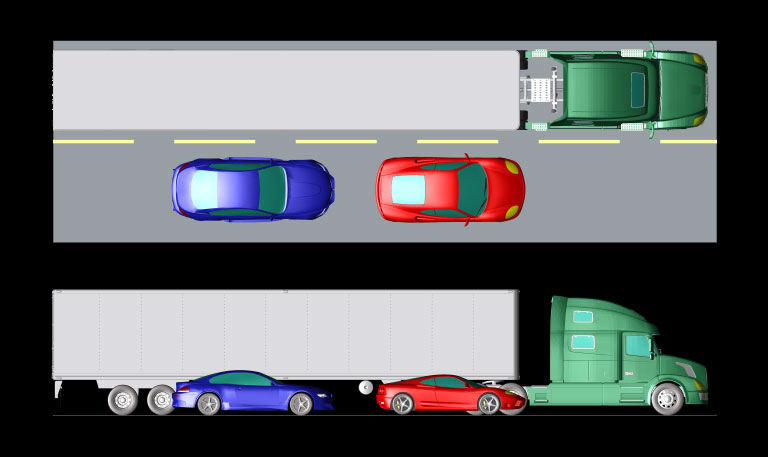
図1:路盤上に2台の乗用車と1台のトラクター・トレーラー・トラックを置いたセットアップ。
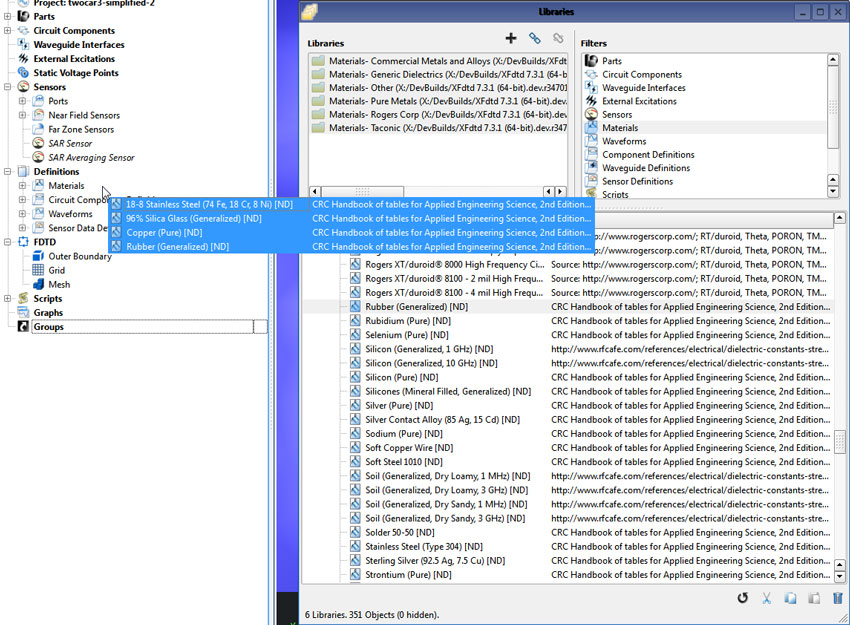
図2:XFプロジェクトへの素材の追加。
各車両は、パラメータ化可能な作業座標系を使用して路面に配置された。これにより、他の車両との相対位置の関数としてのシステム性能に関する後の実験が可能になる。ビデオ1は、パラメータ掃引によって車両の位置がどのように変更されるかを示しています。この例では、2台の車の間隔が約1.5mになるように位置を設定しています。
今回の作業では、フロントバンパー、ルーフ、トランクなど、いくつかの取り付け場所の候補が検討された。XFのLocator機能を使えば、アンテナ設置場所の調査を容易にするため、アンテナ設置場所を素早く切り替えることができます。ビデオ2はLocatorの使い方を示しています。最終的に、ビデオの最後に示されている一般的に使用されているフロントバンパーの位置が、今回の例の取り付け位置となりました。
問題空間の総容積は3.6x106 λ3で、メッシュ化すると37億セル以上になり、シミュレーションには120GB近いRAMが必要です。このような電気的に大きな空間では、少し前までは完全な波動ソルバーを使用することはできませんでしたが、RemcomのMPI + XStreamと大容量メモリのサポートにより、XFはこの問題を簡単に解くことができます。このシミュレーションは、NVIDIA社のPSGクラスタ上で24個のM2090 GPUを使用し、約22分で完了しました。
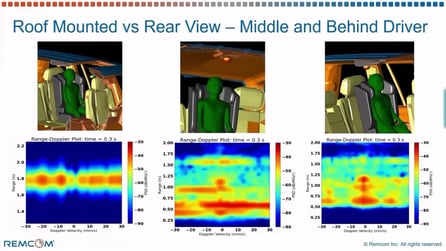
図3と図4は、2台の車の中心を通る平面スライスにおける5.9GHzの定常電界を表示したものである。結果は赤で示した-20dBから黒で示した-100dBの範囲である。図5は、送信機の高さで保存された電界データの平面スライスのトップダウンビューを示し、図6は、2台の車の間の電界相互作用のクローズアップビューを示す。残りの図は、異なる視野角からの同じデータを示している。
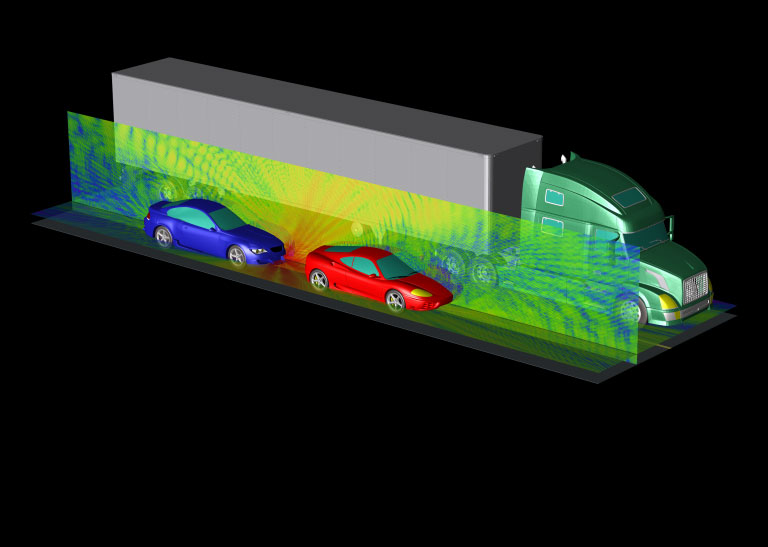
図3:送信機に近い5.9GHzにおける定常状態の電界結果。

図4:送信機を含む垂直面における定常状態の電界結果。
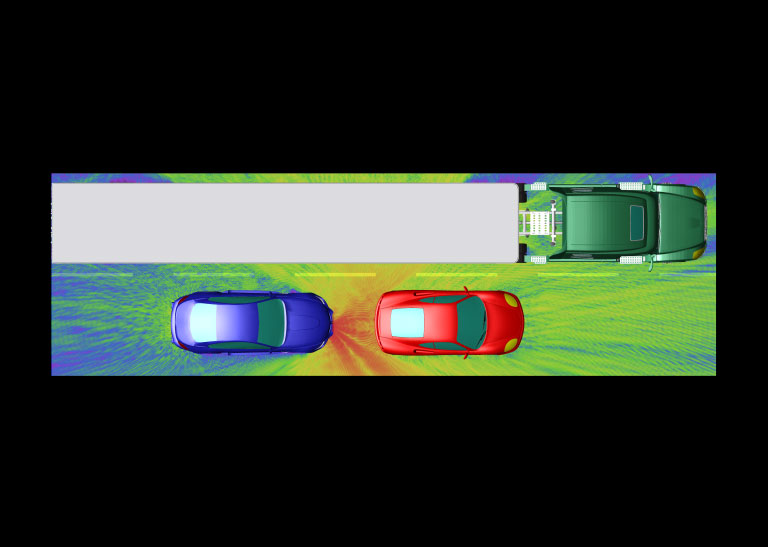
図5:5.9GHzにおける定常状態の電界を上から見た図。
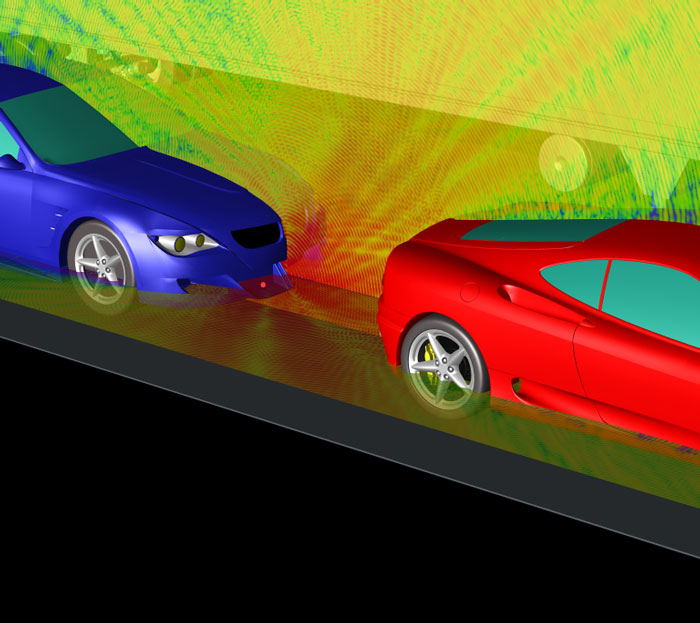
図6:送信機に近い5.9GHzにおける定常状態の電界結果(赤い点)。
この概念実証が完了したことで、さらなる調査を進めることができる。今後の研究では、車両の位置が通信リンクに与える影響を研究する。また、アンテナの配置や車両の素材構成による影響も検討できる。乾燥路と濡れた路の比較や、高速道路ではなく都市部の峡谷での性能比較など、環境変数もモデル化できる。MPI + XStream GPUアクセラレーションを組み合わせることで、設計エンジニアはこの複雑な問題を完全に特徴付け、理解する力を得ることができます。