この例では、詳細な男性モデルの腰に装着した簡易携帯電話の放射パターン、リターンロス、インピーダンス、効率などの性能の変化を評価する。使用した電話機は、閉じた状態の架空のフリップフォンで、主に1.9GHzで低リターンロスとなるようにチューニングされたトリプルバンドアンテナを備えたグランドボードで構成されている。人体モデルはVisible Human Projectの男性をベースにしており、1.9GHz用に調整された材料パラメータを持つ5mm立方メッシュで記述されています。人体モデルはいくつかのポーズで配置され、まず歩いている人をシミュレートし、次にさまざまな腕の位置が電話に与える影響を示します。
簡略化した携帯電話は、図1に示すように、携帯電話が身体の皮膚に接触しないベルト装着状態をエミュレートするために、身体の右腰に配置されています。携帯電話の詳細な性質のため、FDTDメッシュの解像度は、ボディに使用した5mmよりもはるかに細かいものが必要です。携帯電話の明確な解像度を確保するために、0.1667 mmという小さなメッシュ領域が使用されます。次に、ソフトウェア製品VariPoseを使用して、ボディの手足をさまざまな位置に再配置し、XFdtdを使用してフィールドシミュレーションを実行します。
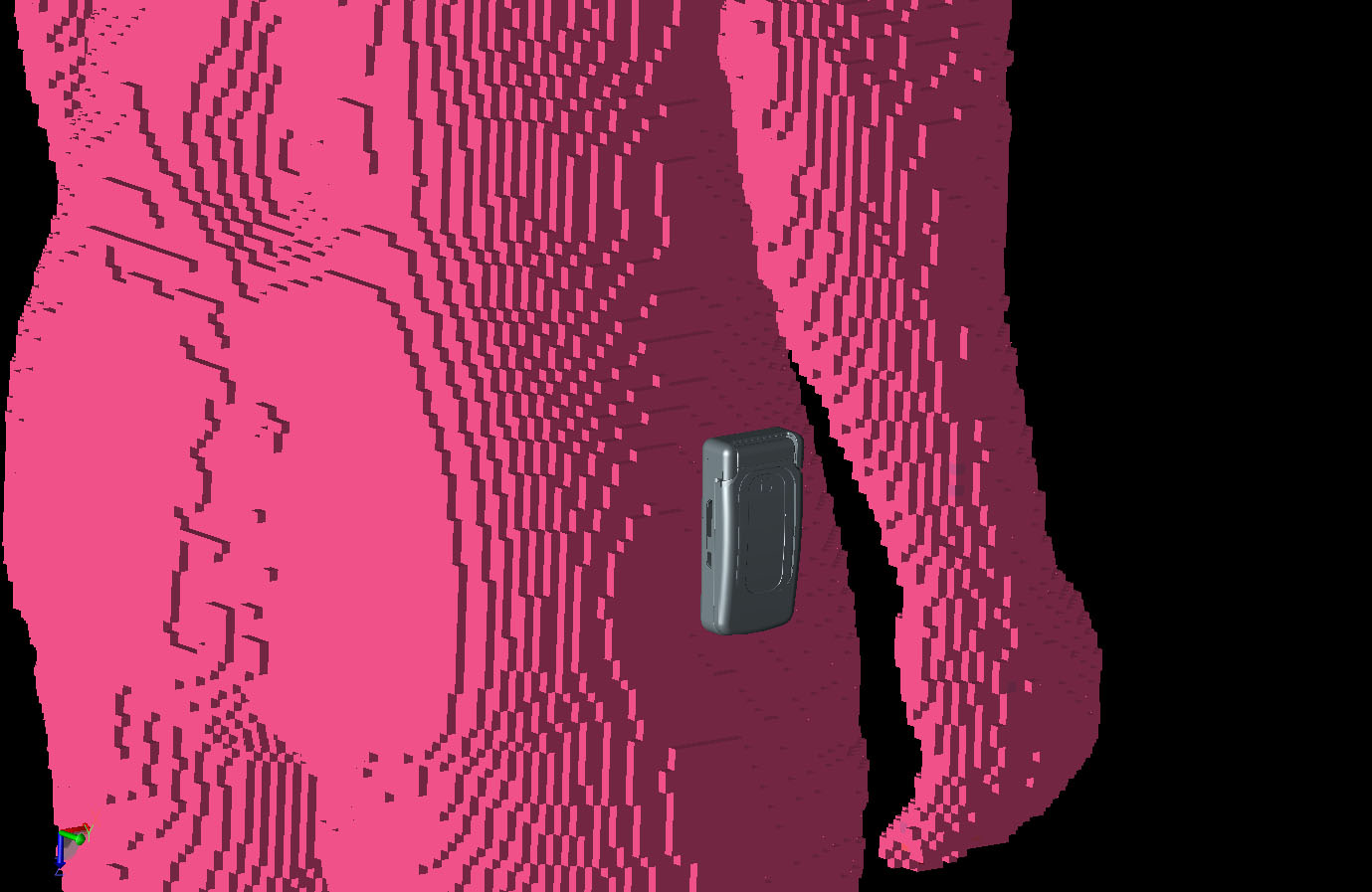
図1:VariPose人体メッシュの隣にグレーで示された腰に装着する携帯電話。
最初の例として、男性は3つの歩行ポーズに体位を変え、腕と脚は左足と右足を前に出し、その中間のニュートラルポジションでステップを踏みます。左足を前に出した最初のポジションを図2に、ニュートラルポジションと右足のステップポジションを図3と図4に示す。すべての場合において、携帯電話は空間に吊り下げられたままであり、腰や腕に触れることはありませんが、見てわかるように、2つのポーズでは腕が携帯電話に近づいています。ポジション1(図5)では、右腕が携帯電話の前方にあり、携帯電話から発生する放射パターンは体の右側に最も高い利得を示している。
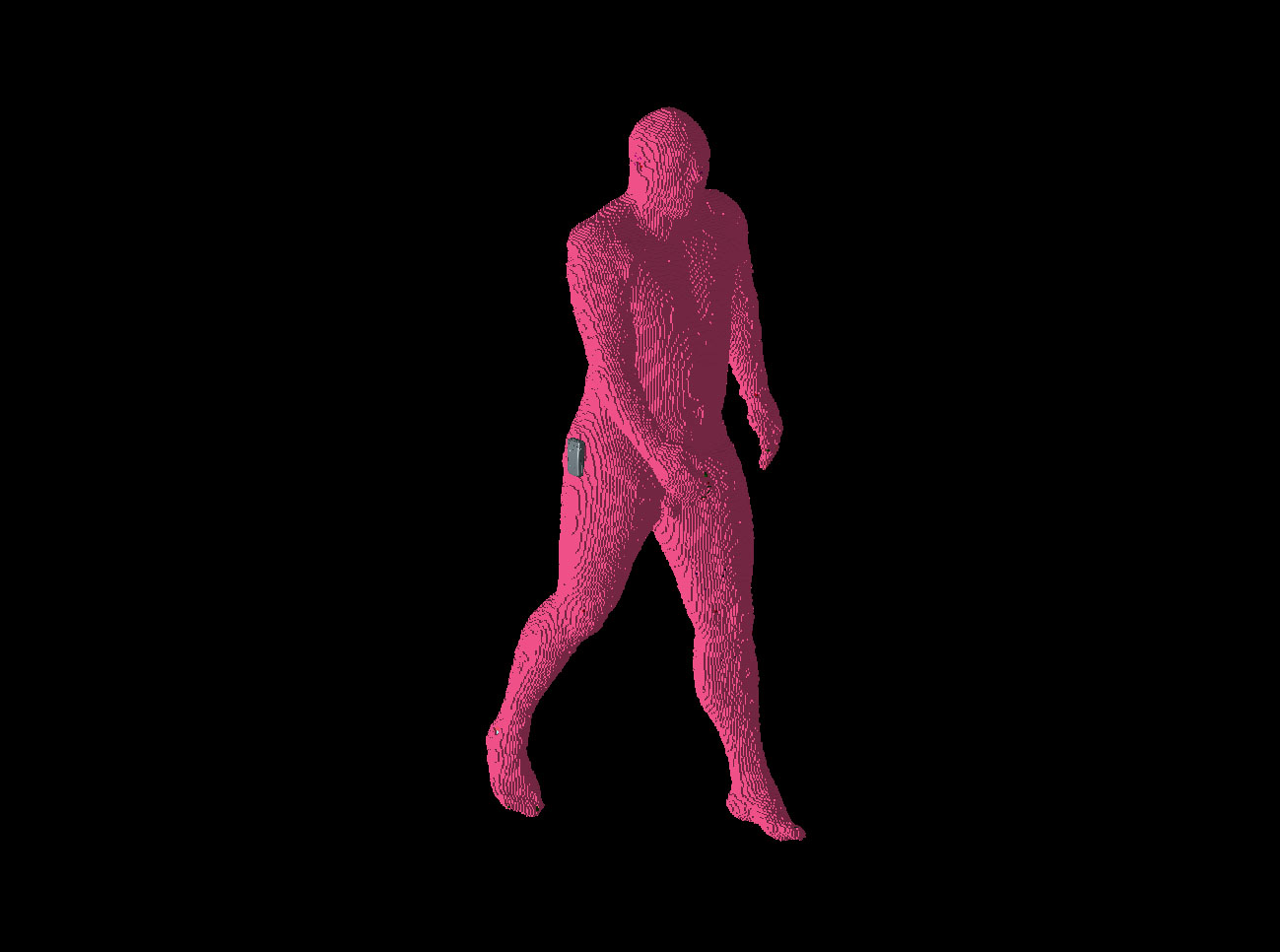
図2:歩く男性のポジション1は、左足を前に出し、右腕を電話の位置より前に出している。
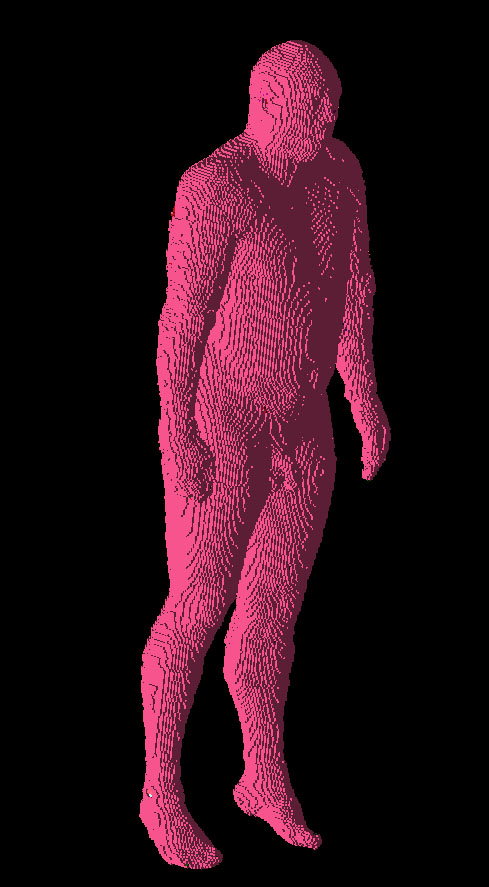
図3:ウォーキング・マンのポジション2は、両足を前に出さず、両腕を横に垂らしたニュートラル・ポジションである。
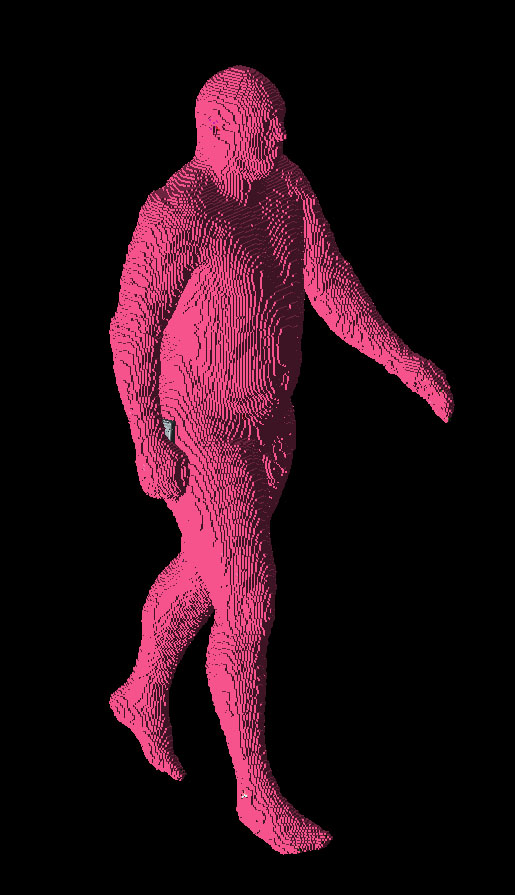
図4:ウォーキング・マンのポジション3は、右足が前方にあり、右腕は後ろにあるが、まだ電話の多くをカバーしている。
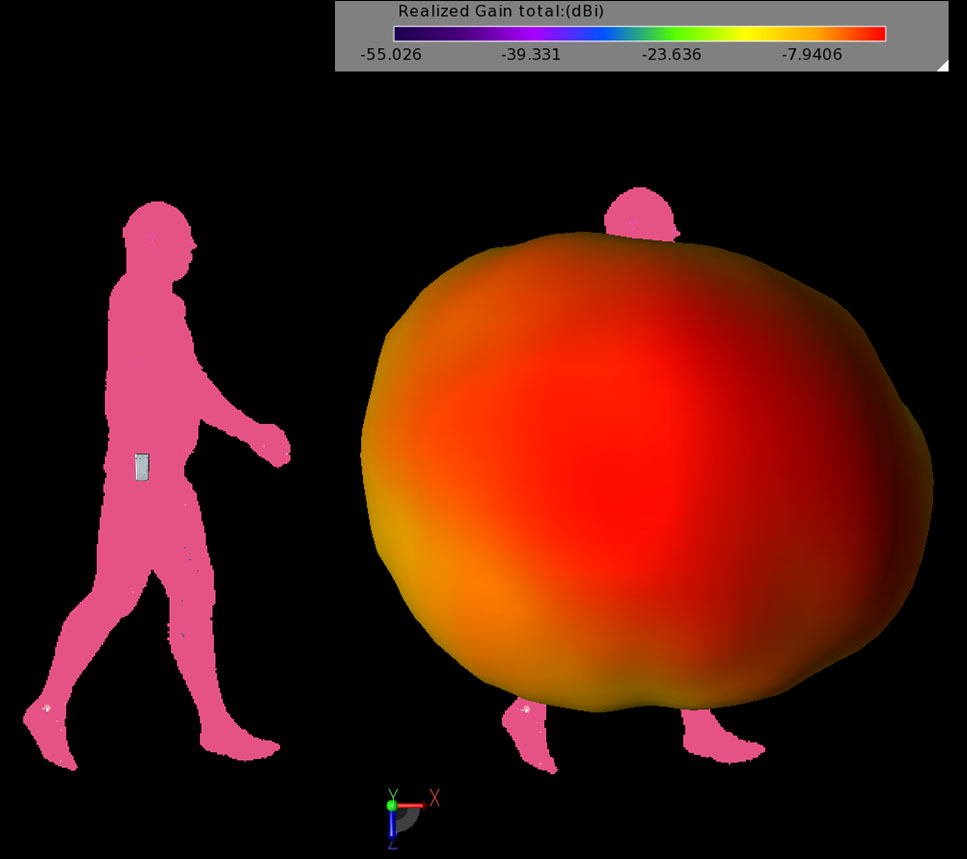
図5:ウォーキング・マン ポジション1のゲインパターン。
体位 2 と 3(図 6 と 7)では、右腕が電話の位置 に近づくため、アンテナからの利得は減少し、順方向と逆方向 に向かいます。リターンロスとインピーダンスは、体の位置の違いによる影響はほとんど見られませんが、表1に示すように、腕が電話の近くにある2つのケースでは、効率が大幅に低下します。水平の場合(図8)と垂直の場合(図9)の3つの位置の利得プロットを一緒にプロットし、垂直のスライスは体の右から左への断面を通している。図8では、身体は0度方向を向き、携帯電話は90度の位置にある。図9では、携帯電話を持った腰が再び90度に向いている。
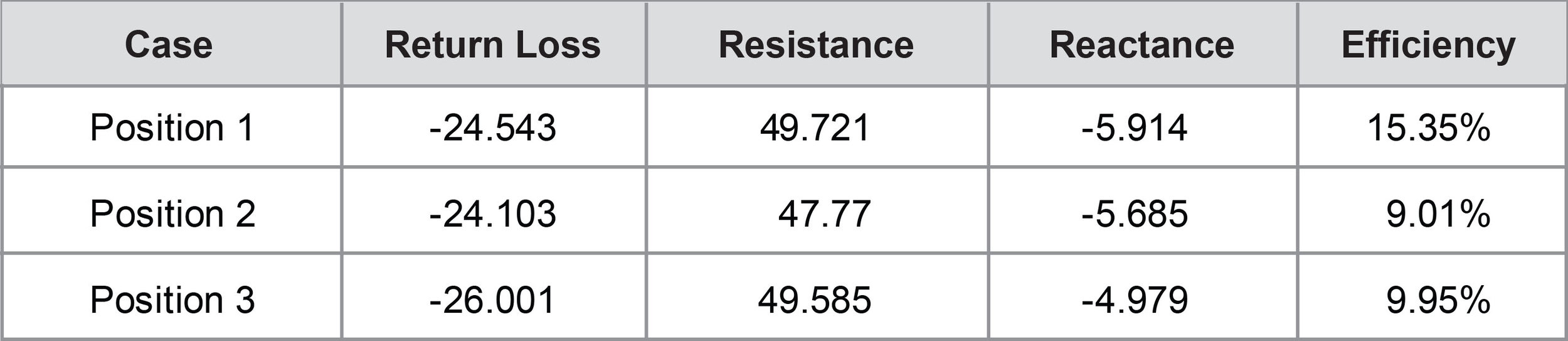
表1.
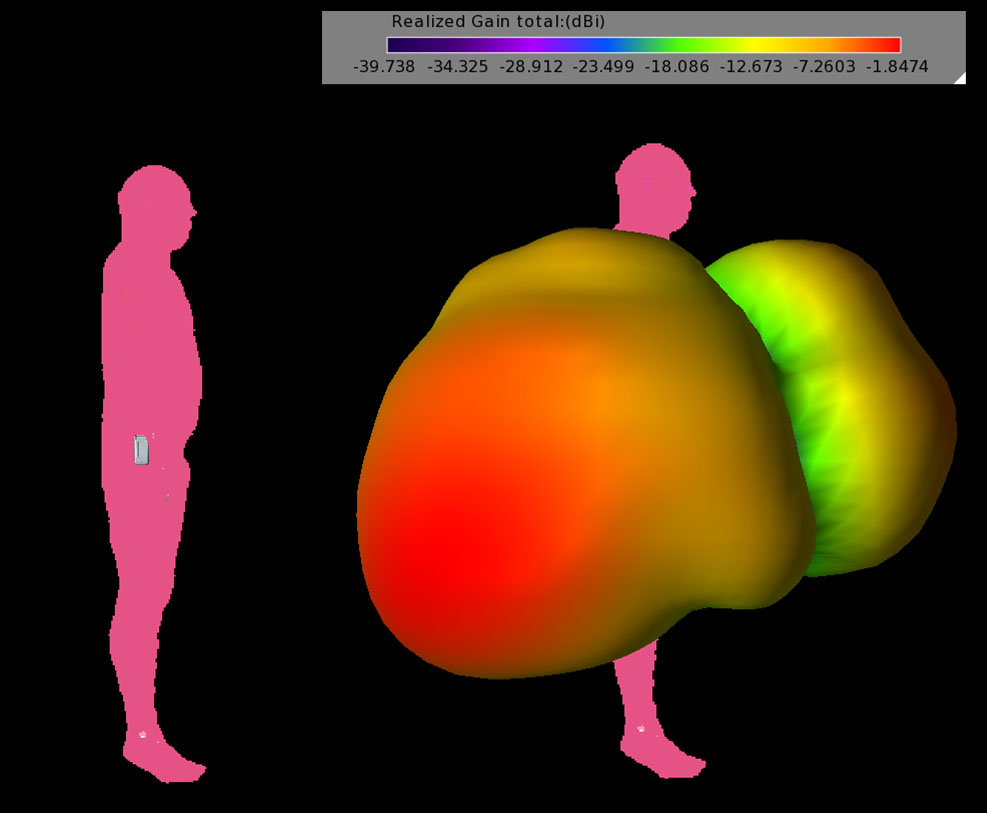
図6:腕が携帯電話からの放射をブロックし、ピークゲインが後方にシフトしてパターンが分割されているポジション2のウォーキングマンのゲインパターン。
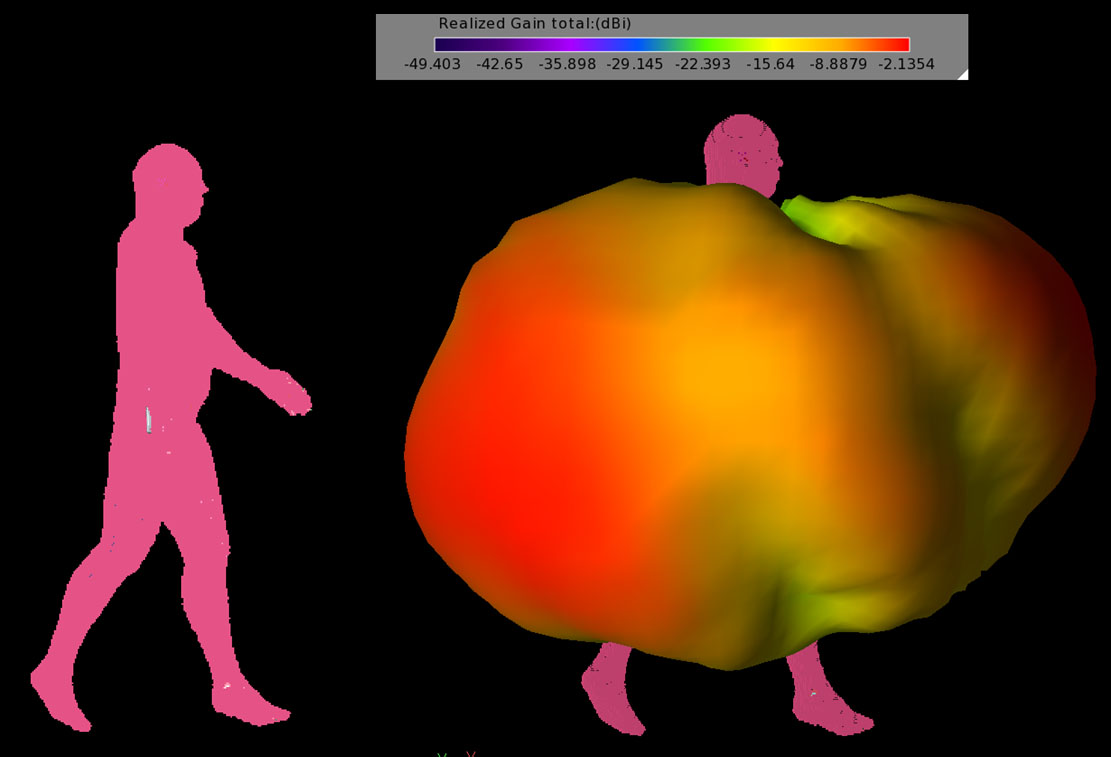
図7:右腕がまだ携帯電話を覆っているポジション3を歩いた場合のゲインパターン。腕が同じような位置にあるため、パターンはニュートラルポジション2の場合と似ている。
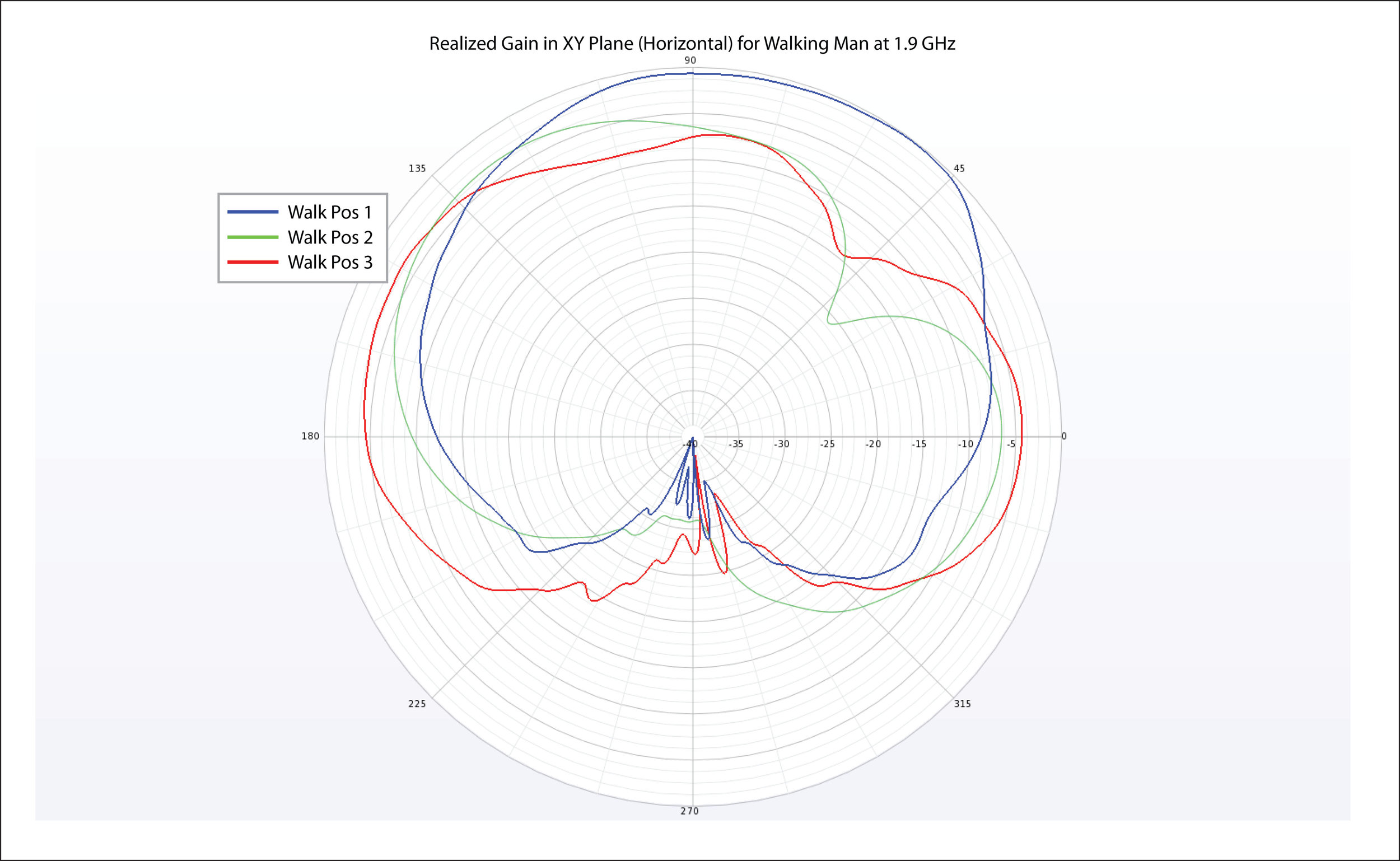
図8:歩く男性の3つの位置に対する水平面の平面ゲインパターン。プロットでは、男性は0度方向を向き、電話は90度方向を向いている。
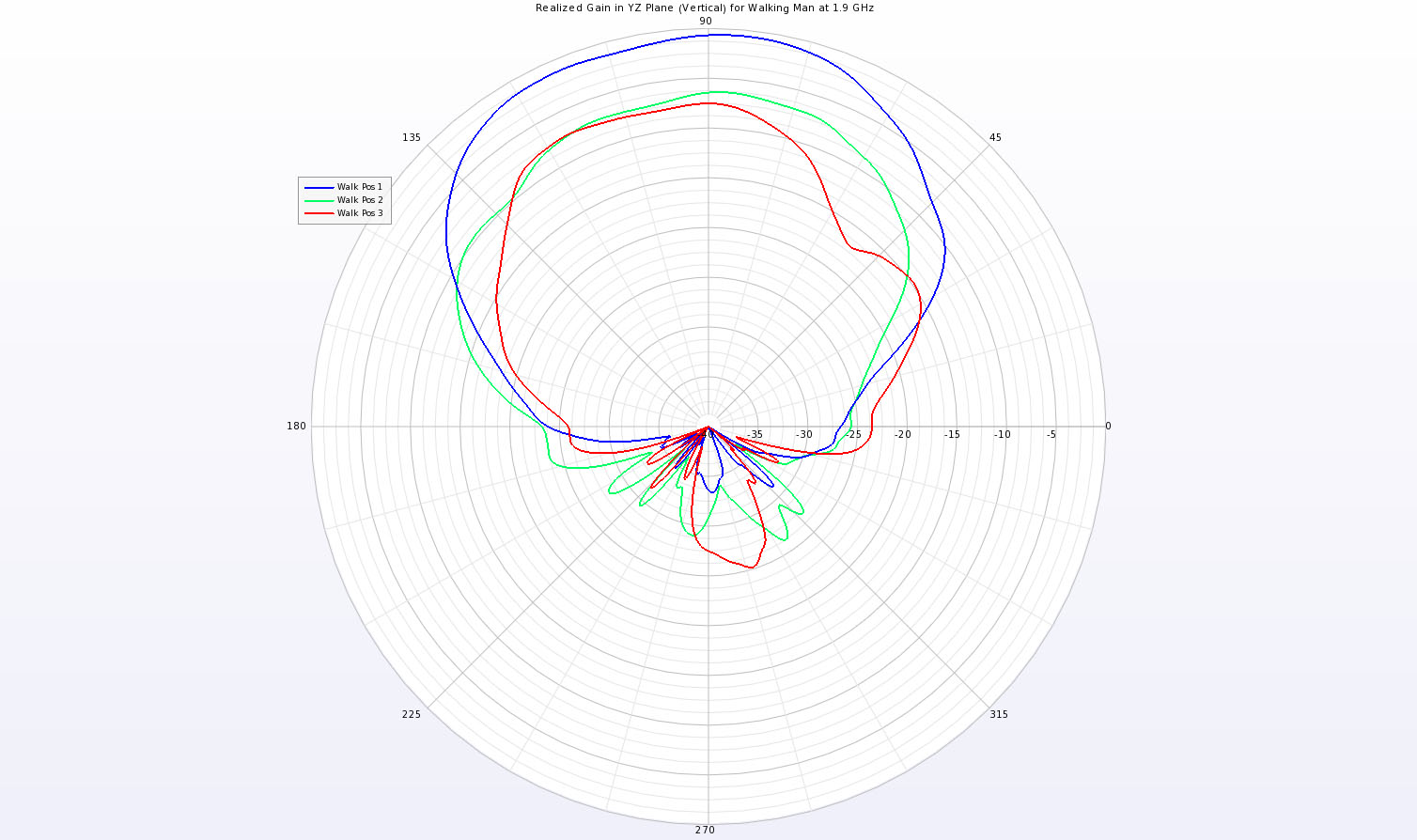
図9:携帯電話を90度の位置に置き、男性を左右に横切る垂直スライスにおける平面ゲインパターン
最初の練習で、腕の位置が携帯電話のアンテナに大きな影響を与えることが明らかになった。第二の例として、右腕の位置を10度刻みで11段階に変化させ、アンテナ性能への影響を測定しました。携帯電話に対する腕の動きは図10に示されており、11のポジションすべてが表示されている。
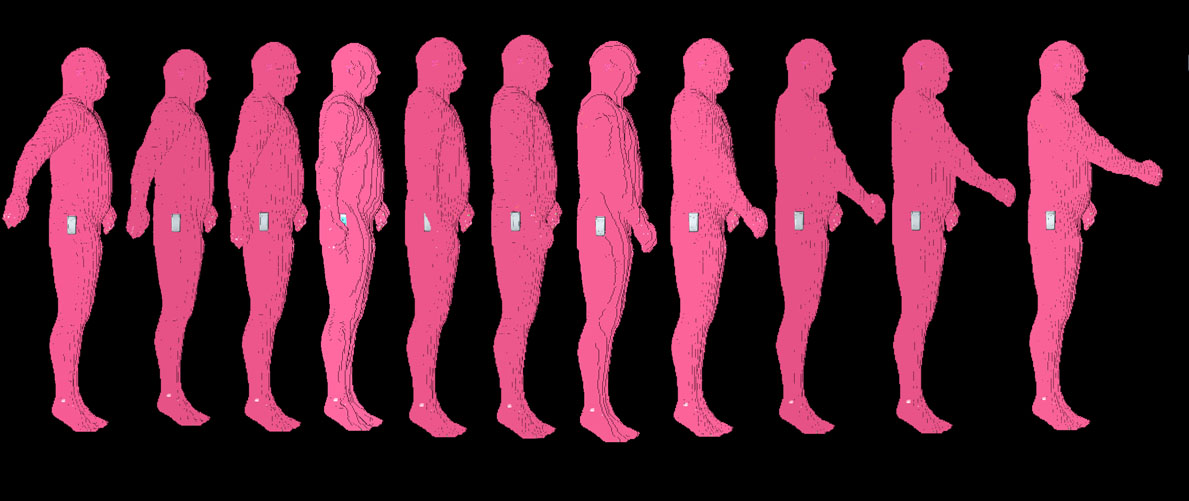
図10:シミュレーションに使用したムービングアームの11の位置を示す。
腕の動きは電話機の性能、特にゲインパターンに大きな影響を与えます。図11では、腕が最も後ろの位置(ポジション1)にある場合のゲインパターンが示されており、ゲインのピークは体の側面にあります。図12では、腕がポジション4にあり、ゲインパターンが大きく異なり、ピークゲインは体の前方にある。図13に示すポジション10では、腕がほぼ完全に前に出ているため、ゲインパターンは再び体の側面にピークがあることがわかります。図14では、11ポジションすべてのゲインパターンを一緒に示しており、白い矢印がゲインのピークの方向を示している。腕の動きによって、パターンの形状とレベルが大きく変化することがわかる。比較のため、図15と16に水平面と垂直面のゲインを折れ線グラフで示す。
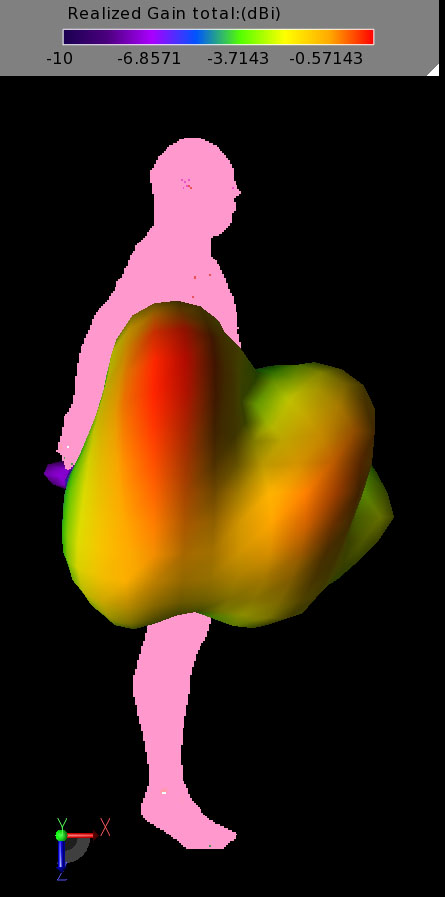
図11: アームが後方にあるポジション1のゲインパターンをプロットしたもの。アームは主に放射パターンの邪魔にならず、ピークゲインはボディの側面にある。
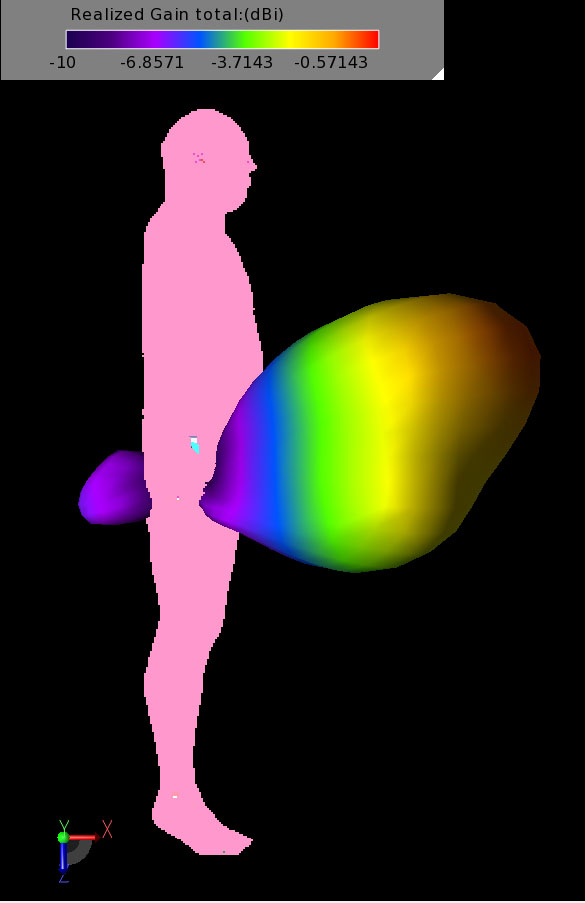
図12:電話機からの放射が遮られたポジション4の腕のゲインパターン。ピークゲインは男性の前方にある。
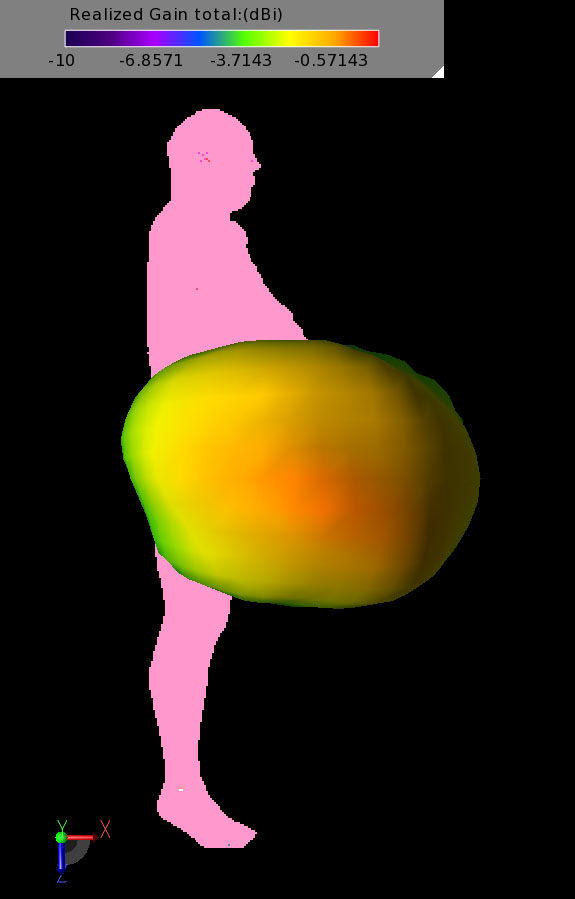
図13:腕が主に携帯電話の前方にあるポジション10のゲインパターン。パターンはまだ影響を受けているが、ゲインのピークは再び体の側面にある。
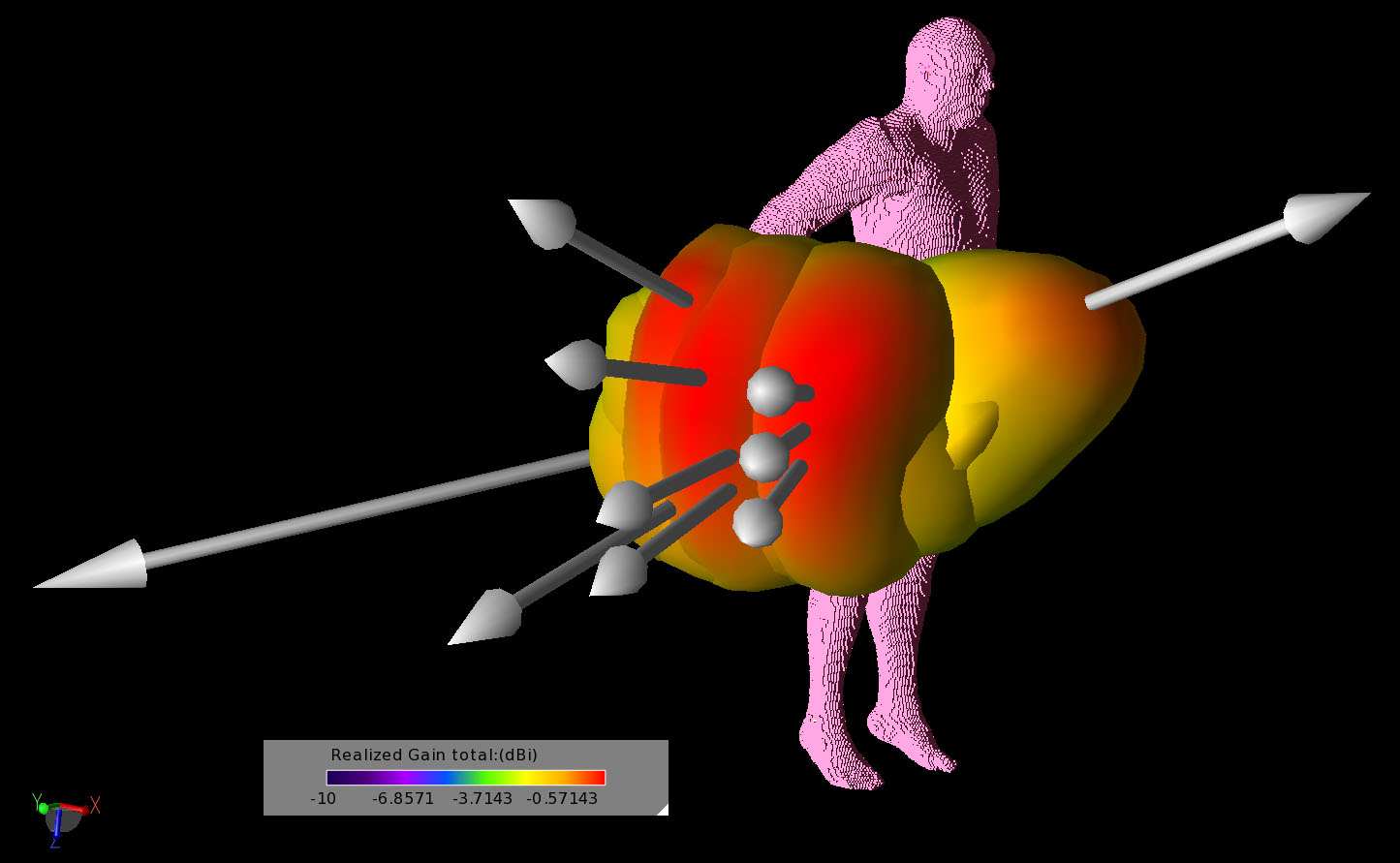
図14:異なるアーム位置の全11種類のゲインパターンをプロットしたもの。矢印はピークゲインの方向を示しており、アーム位置によって大きく変化することがわかる。
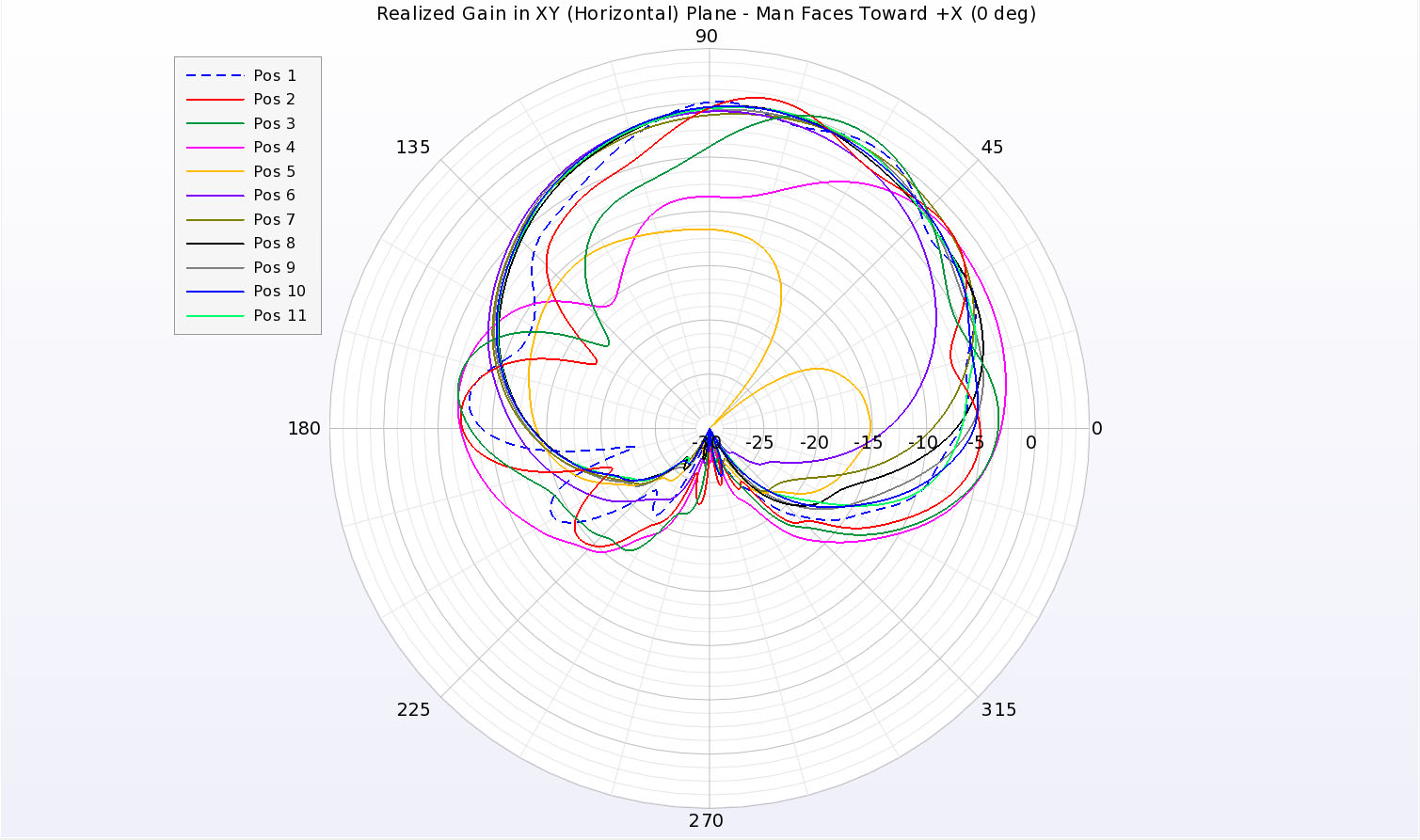
図15:水平面における全11ケースのゲインパターンの平面プロット。ここでは、男性は0度の点を向き、電話は90度の点にある。
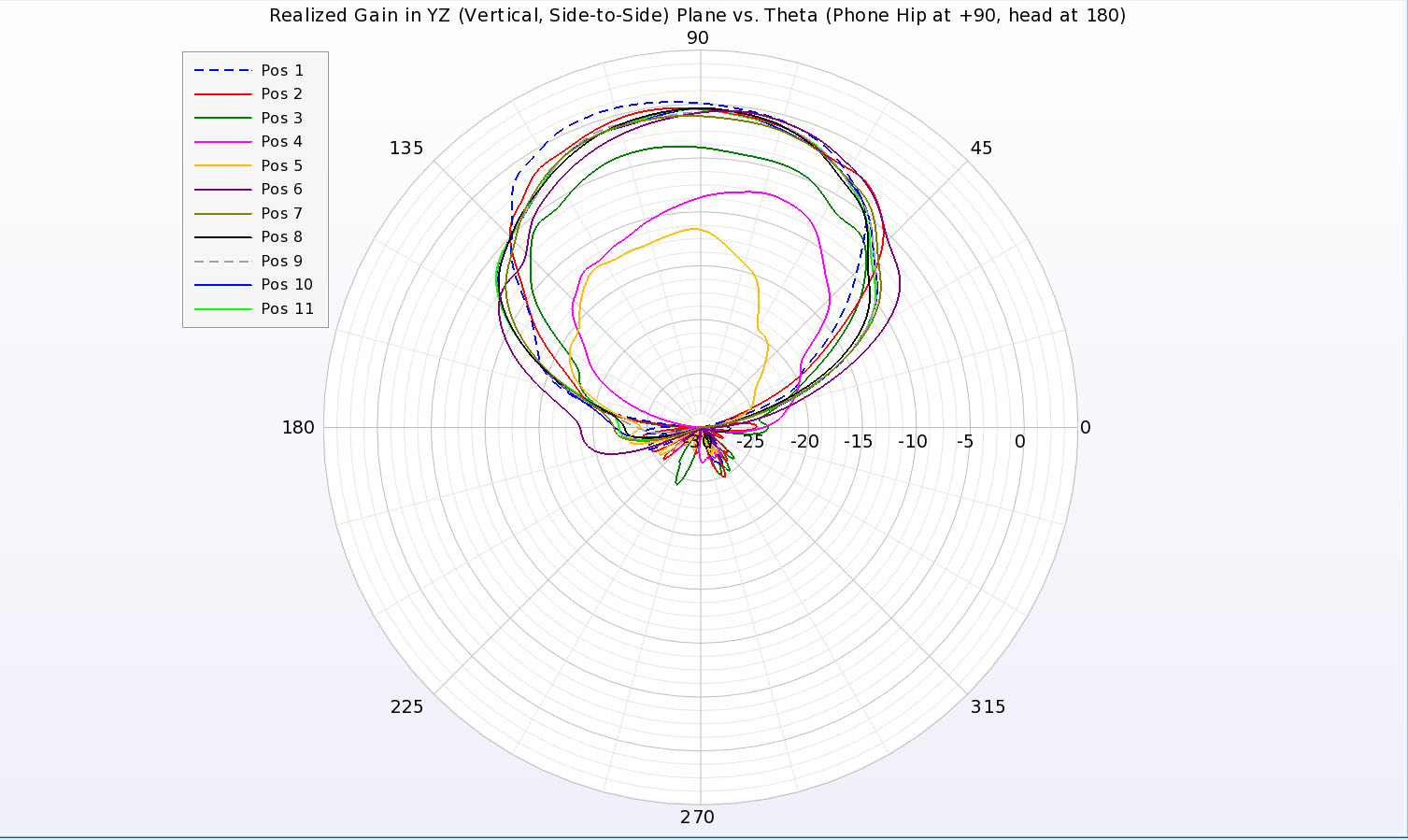
図16: 男性を左右に横切る垂直面における、全11ケースのゲインパターンの平面プロット。携帯電話は90度の位置にある。
リターンロスとインピーダンスのフィードポイント値を比較する場合、アームの動きはほとんど影響しない。全アーム位置の値のまとめを表2に示す。システム効率も、アームが電話の真上にあり、効率が著しく低下するポジション5の場合を除き、すべてのアーム位置でわずかに変化するだけである。
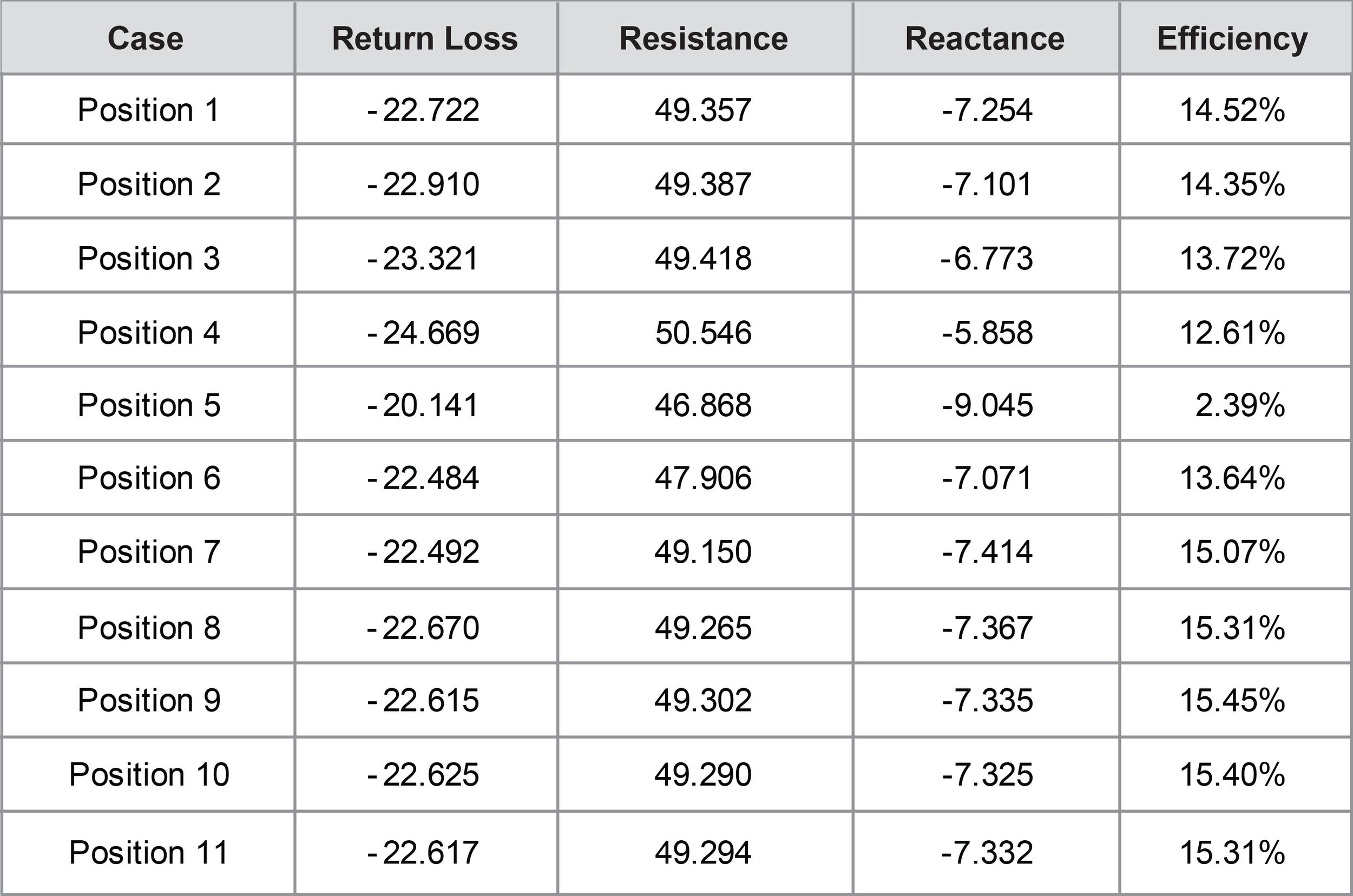
表2.
この一連の例では、VariPoseと XFdtdソフトウェア製品を組み合わせて使用することで、移動する人体という動的環境におけるデバイス(この場合は携帯電話)の性能を解析できることを示した。


